
Commentary | DOI: https://doi.org/10.31579/2690-4861/351
1 Clinical Hospital Center Sestre milosrednice Zagreb, Clinic for Surgery, Croatia.
2 Private Orthopaedic Surgery Clinic, Marinko Erceg Pty. Ltd., Split, Croatia.
3 Clinical Hospital Center Split, Clinic for Surgery, Split, Croatia.
4 General Hospital Šibenik, Croatia.
*Corresponding Author: Marinko Erceg, Private Orthopaedic Surgery Clinic, Marinko Erceg Pty. Ltd., Split, Croatia.
Citation: Erceg D., Erceg M., Bečić K., Bekavac J., (2023), What Is the Size and Delineation of The Horizontal Lever Arm K1 In Pauwel's Hip Biomechanics? International Journal of Clinical Case Reports and Reviews, 15(2); DOI:10.31579/2690-4861/351
Copyright: © 2023, Marinko Erceg. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Received: 13 November 2023 | Accepted: 04 December 2023 | Published: 13 December 2023
Keywords: delineation; Pauwel's hip biomechanics; horizontal lever arm k1; hip displacement
Every object around us is exposed to the actions of mechanical forces as well as laws of statics and dynamics. This can be particularly well seen on the locomotor system, and special attention is devoted to the biomechanics of the hip. This was a special area of interest for Pauwels. When standing on both legs, both of the hips equally carry the weight of the body (above the hip line). It is believed that upper body amounts to 2/3 of the total body weight (2/3 G), while lower extremities amount to 1/3 of the bodyweight. Therefore, when standing on both legs, each hip carries up to 1/3 of body weight (G / 3), which is a relatively small load for the hip joint. The direction of the force that acts on hips is vertical.
Every object around us is exposed to the actions of mechanical forces as well as laws of statics and dynamics. This can be particularly well seen on the locomotor system, and special attention is devoted to the biomechanics of the hip. This was a special area of interest for Pauwels. When standing on both legs, both of the hips equally carry the weight of the body (above the hip line). It is believed that upper body amounts to 2/3 of the total body weight (2/3 G), while lower extremities amount to 1/3 of the bodyweight. Therefore, when standing on both legs, each hip carries up to 1/3 of body weight (G / 3), which is a relatively small load for the hip joint. The direction of the force that acts on hips is vertical (Figure 1). However, the load on the hip while standing on one leg, i.e., walking, is very different and far more unfavorable for the hip. Pauwels presented the hip under load as a balanced horizontal scale with the center of rotation in the center of the hip, and force momentums M1 and M2 on the both sides. The force moment M1 is the product of medial arm of the scale (bodyweight lever arm) k1 and the weight of the body G, and the momentum M2, a product of lateral arm of the scale (muscle force lever arm) k2 and the force of the hip abductor F. In order to keep the pelvis horizontal while standing on one leg M1 should be equal to M2, (k1 · G = k2 · F). As k1 arm of the adult is approximately 3 times longer than the k2 arm, the muscular force F must be about 3 times the weight of body G. From this Pauwels concludes that while standing on one leg the total load on the hip in adults is approximately 4 times the bodyweight (R ≈ 4 G). According to the same author force R is inclined to the vertical axis at an angle of 16 ° in the frontal plane (Figure 2,3), [1]. The fact that the hip joint is loaded with 4 body weights makes it the most heavily loaded joint in the human body.

Figure 1: In position standing on both legs each hip is loaded with 1/3 of the body weight G. Figure 2: Pauwels shematic of the hip biomechanics. Lever k1 is from the center of the hip joint to the line going vertically at the border of the foramen obturatum on side of the raised leg. Figure 3: Total loading when standing on one leg, according to Pauwels is about 4 G.
The Pauwels schematic can be well used to explain the hip balance when the center of the femoral head is not displaced from its natural position in the acetabulum, but it can't be used to depict biomechanical relationships in the dislocated hip when the femoral head is laterally and cranially displaced from the acetabulum. This is shown in the works of Erceg M. where the muscle force lever arm (k2) is shown in a different way, not horizontally, as shown by Pauwels, but more or less vertical (figure 4,5) [2]. In hip displacement the femur is moved laterally, thus increasing the value of the horizontal lever k1, but it is also moved cranially, thus reducing the vertical lever k2. Both have an adverse effect on the hip biomechanics. The hip balance is disrupted, and to keep the balance (to keep the pelvis horizontal) the hip abductors would have to provide even more strength thus burdening the hip even more. Such strength hip abductors can't provide, because their origin and insertion are brought closer. There is a relative insufficiency of the hip abductor and thus limping.
In this paper we are not discussing the muscular force lever k2 (whether it is horizontal or vertical) but horizontal lever k1 over which the weight of the body of G acts. Pauwels' scheme shows that the k1 lever starts from the center of the hip, crosses the middle of the pelvis in the frontal plane and reaches the vertical line of the obturator foramen on the side of the raised leg. On this line there is a body weight vector G (figure 2,3,5).
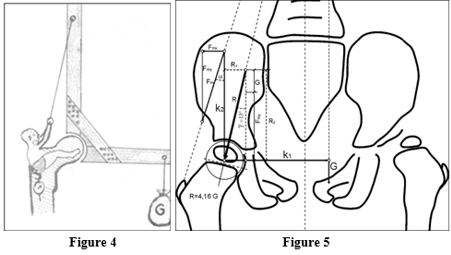
Figure 4: Hip abductor muscles act over vertical lever k2, whose length changes in situation of hip dislocation. Figure 5: New way of presentation hip biomechanics. Lever k1 reaches to the border of the obturatum foramen on the side of raised leg.
However, at the same time, there are images of numerous other authors who use Pauwels schematic but the lever k1 on those pictures is not the same length. On some of the illustrations, the k1 lever represents the distance from the center of the hip to the middle of the pelvis midline, passing through the symphysis of pubis in the frontal plane with the body weight vector G on it (figure 6,7) [3,4,5,6], while in other images, k1 is depicted as shown by Pauwels (Figure 8), [7]. Frequently, such images are used before and after the hip Aloarthroplasty. Hence, the size of the horizontal arm k1 is not equal in all of the images.

Figure 6: On this X ray of the pelvis with both hips, lever k1 reaches only to the middle of pelvis (vertical line passing pubic symphysis). Why? Figure 7: Presentation of hip biomechanics after hip Aloarthroplasty. Lever k1 reaches to the middle of the pelvis. Why? Figure 8: Presentation of hip biomechanics after hip Aloarthroplasty. Lever k1 reaches to the middle of the pelvis. Why?
The line on which the body weight vector G is located is moved (according to Pauwels) to, approximately, the obturator foramen on the side of the raised leg, because while standing on one leg, the burdened hip does not carry the entire body weight, but only the weight of the body above the level of the hip with the weight of the other (raised) leg. Therefore, the leg on which we stand does not participate in the body's weight, and burdening the hip, while the raised leg does, and for this reason, the line on which the weight vector of the body lies (force G) is moved towards the raised leg. Therefore, the length of the lever arm k1 is shown as the distance from the hip center to the obturator foramen of the pelvis on the side of the raised leg (figs. 2,3,5). Due to the fact that the burdened leg does not participate in the load of the hip, the force moment M1 is k1 · 5/6 G (fig. 8).
If we, in order to simplify the calculation, accept the fact that the body weight vector G is not 5/6 G, but G (whole body weight), then it would make sense to include the "shorter" horizontal lever k1 (figs. 6,7) that reaches the center line on which the body weight vector G lies (in the frontal plane it is a pubic symphysis). Then the force momentum M1 would be approximate in both cases, but in the case of the "shorter" lever arm k1 the total load force on the hip R would be more vertical than in the case of the "longer" lever arm k1, that results from Pawels' original schematic.
Authors do not understand the reason for this balance representation in terms of lever arm k1 size. We think that the length of the k1 lever arm is from the center of the hip to the vertical line passing through the edge of the obturator foramen on the pelvic side of the raised leg and body weight G is on that vertical line, not on the line passing through the pubic symphysis in the frontal plane.
This different way of presenting biomechanics of the hip can confuse younger colleagues, especially those who are at the beginning of their orthopedic education and training.
The author declares no competing interests.
Dear Editorial Team, Clinical Medical Reviews and Reports. My experience with the journal was highly positive. The peer-review process was rigorous, constructive, and completed in a timely manner. The reviewers provided valuable comments that helped improve the quality and clarity of our manuscript. The editorial office was professional, responsive, and supportive throughout all stages of the publication process. Communication was clear and efficient, and any questions were addressed promptly. Overall, I found the journal to maintain high scientific standards and an excellent publication workflow. I would be pleased to consider submitting future work to this journal. Best wishes from, Elena Popa.

It was my pleasure to submit my testimonial concerning the Reviewer Board of our Scientific Journal “Brain and Neurological Disorders”. The Reviewers focused on some modifications and their contribution was helpful. The ladies of our Editorial Office were also supported my efforts. It was my honor to have such a co-operation and I am looking forward for more collaboration.

Dear Grace Pierce, Editorial Coordinator of Journal of Clinical Research and Reports, Thank you for the speedy and efficient peer review process. I appreciate the fact that your peer reviewers do not take months to respond like with some other journals. I would also like to thank the editorial office for responding quickly to my questions. It is an excellent journal. I plan to submit more manuscripts in the future. Best wishes from, Robert W. McGee

Dear Grace Pierce, Editorial Coordinator of Journal of Clinical Research and Reports, Working with you and your team on our recent publication in JCRR has been a truly wonderful and enjoyable experience. The responses were prompt, and the reviewers were patient, constructive, and highly professional. One reviewer in particular gave me the feeling that a professor was carefully reading and commenting on my coursework, which was deeply touching. The entire process was straightforward and hassle‑free, with no tedious online forms to complete. I highly recommend this journal. Best wishes from, DR Aibing Rao, Head of R&D

I Appreciate the Opportunity to Share my Experience with the Journal of Clinical Research and Reports. The peer review process was timely and constructive, and the feedback provided helped improve the quality of our manuscript. The editorial office was professional, responsive, and supportive throughout the process, ensuring smooth communication and efficient handling of the submission. Overall, it was a positive experience collaborating with your team.

Dear Mercy Grace, Editorial Coordinator of Obstetrics Gynecology and Reproductive Sciences, We would like to express our gratitude for your help at all stages of publishing and editing the article. The editors of the magazine answer all the necessary questions and help at every stage. We will definitely continue to cooperate and publish other works in the Obstetrics Gynecology and Reproductive Sciences! Best wishes from, Alla Konstantinovna Politova,
