
Research Article | DOI: https://doi.org/10.31579/2693-4779/174
Institute for Advanced Engineering, 175-28, Goan-ro 51 beon-gil, Baegam-myeon, Cheoin-gu, Yongin-si, Gyeonggi-do, 17180, Korea.
*Corresponding Author: Dongchan Lee, Institute for Advanced Engineering, 175-28, Goan-ro 51 beon-gil, Baegam-myeon, Cheoin-gu, Yongin-si, Gyeonggi-do, 17180, Korea.
Citation: Dongchan Lee. (2023), Feasibility Design of Magnetic Auxetic Tactile Sensor for Monitoring the Movement of Human Body, J Clinical Research and Clinical Trials, 8(4); DOI: 10.31579/2693-4779/174
Copyright: © 2023, Dongchan Lee. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received: 08 December 2023 | Accepted: 15 December 2023 | Published: 26 December 2023
Keywords: on-skin sensor; magnetic particle sensor; auxetic structure; force sensing
Soft magnetic tactile sensors are versatile devices with potential applications in next-generation flexible electronics. We for the first time developed a new type of soft magnetic tactile sensor called soft auxetic magnetic particle sensor (soft-AMPS) and evaluated its response characteristics. Soft-AMPS contain ferromagnetic powders that are pre-magnetized in a magnetic field, followed by being mixed with a liquid resin, such as polydimethylsiloxane (PDMS) and ECO-FLEX. When an external force is applied to the sensor, the relative distance among the magnetic particles is altered, resulting in a change in the magnetic flux detected by an underlying Hall sensor. The soft-AMPS offers precise sensing with fewer I/O compared to conventional auxetic resistive sensors. Along with its soft materials, the auxetic structure reduces the required force, enhancing wearability. In our research, we compared the Poisson's ratio of the auxetic structure obtained through simulations with that of silicon material. We also compared sensing inputs based on patterns and selected structurally efficient patterns. As a result, our soft-AMPS required approximately 17% of the force to obtain the same amount of input compared to the non-auxetic version and had the sensitivity of 400% to the non-auxetic version. Additionally, the soft-AMPS is calibrated in real-time through a reference Hall sensor, confirming a resolution of 2.9 degrees. The soft-AMPS can be applied to human-robot interaction and human-machine interaction devices by detecting the movement of human body skin in a robot hand/arm or highly sensitive skin sensor.
Recent advancements in wearable technology (Yin et al., 2021), soft robotics (Yasa et al., 2023), human-robot interaction (Kyung and Kim, 2019) (Pang et al., 2020), and human-machine interaction (Dong et al., 2018) have sparked a growing interest in embedded soft devices. Accordingly, various methods have been proposed to manufacture soft sensors that can be integrated into soft systems (Chen et al., 2018) (Zhao et al., 2023).
Soft tactile sensors are manufactured in various sizes, ranging from micrometers (Watatani et al., 2019) to centimeters (Zhu et al., 2021). These are employed in generating device (Shih et al., 2017) (Kim et al., 2022) and robot movements (Roberts et al., 2021) through shape changes based on flexible structures and precise. Tactile sensors primarily utilize various elements such as resistance (Zheng et al., 2023) (Zhu et al., 2022b), capacitive (Zhu et al., 2022a) (Niu et al., 2022), and optical (Wei et al., 2023) to facilitate the perception of touch. Among these, magnetic-based tactile sensors sense distance, vectors, and other parameters by utilizing an external magnetic field (Man et al., 2022). These magnetic tactile sensors are primarily constructed using materials with skin-like compliance and magnetic powder, and they collect data using 3-Axis Hall sensors (Hellebrekers et al., 2019) (Yan et al., 2021).
To create materials with skin-like compliance, silicone-based elastomers and polyurethane are commonly used (De Boer et al., 2017). These flexible polymers exist in a liquid state with fluidity before being mixed, forming a mixture with magnetic powder before curing (Nagahama et al., 2019). These mixtures are injected into molds and cured on magnets, or they are fabricated using 3D printing techniques (Hu et al., 2022) (Zhang et al., 2021).
Auxetic structures are characterized by a negative Poisson's ratio, which effectively enhances the sensitivity of sensors based on their mechanical properties (Ren et al., 2018). Sensors incorporating such structures have been studied using various methods, including resistive, piezoresistive, piezoelectric, capacitive, and triboelectric approaches (Kim et al., 2018) (Chang et al., 2023) (Mao et al., 2022) (Dong and Hu, 2023).
In this study, we introduce the hall sensing-based auxetic tactile sensor for the first time. The hall sensing-based auxetic tactile sensor comprises two Hall sensor arrays and a soft auxetic matrix constructed from ferromagnetic powders and eco-flex material. In contrast to previous research, our approach emphasizes not only enhanced sensitivity owing to the Hall sensing mechanism, but also improved wearability and conformality through the adoption of an auxetic structure with a negative Poisson’s ratio. To determine an ideal pattern for the auxetic structure, we conducted Finite Element Analysis (FEA) to calculate Poisson’s ratios for various patterns, which were empirically validated. We selected a rotating square plate and integrated it with Hall sensing arrays for strain sensing applications. We compared the Poisson's ratio of the auxetic structure obtained through simulations with that of silicon material and sensing inputs based on some patterns, and selected structurally efficient auxetic patterns.
Basic Auxetic Structure for Magnetic Auxetic Tactile Sensor
Auxetics are defined as materials or structures with the elastic property of negative Poisson’s ratio (NPR): when the material is stretched in one direction, it expands in one or more transverse directions as well. (Ashby and Gibson, 1997) (Gibson et al., 1982) This differs from most materials/structures that typically show a contraction in the perpendicular direction to the stretched direction. Wearable electronic devices can monitor various strains, which is beneficial to human healthcare, medical rehabilitation, soft robotics, human-robot interactions, and human–machine interactions. Strain sensors have received more attention owing to their good conformality, integrability and wearability. To guarantee widespread application, wire strain sensors should possess high sensitivity, high stretchability, and excellent durability. The sensitivity, indicated by the gauge factor (GF), is evaluated by the following equation.
 (1)
(1)
where  ,
,  , R, C, ε and v denote the relative resistance change, the relative capacitance change, real-time resistance, real-time capacitance, tensile strain, and Poisson’s ratio, respectively. When an increasing force (∆F) applied onto one of the sensing units, the capacitance or resistance is measured for each increment. The sensitivity S of a capacitance or resistance or magnetic flux can be expressed as,
, R, C, ε and v denote the relative resistance change, the relative capacitance change, real-time resistance, real-time capacitance, tensile strain, and Poisson’s ratio, respectively. When an increasing force (∆F) applied onto one of the sensing units, the capacitance or resistance is measured for each increment. The sensitivity S of a capacitance or resistance or magnetic flux can be expressed as,
 (2)
(2)
Where  is the amount of the change in the sensed-magnetic field before and after strain applied, and
is the amount of the change in the sensed-magnetic field before and after strain applied, and  is the applied force change. Among the above-mentioned indicators, stretchability and durability are especially important because they ensure large stress loading and stable output of sensing signals after repeated deformation. Although resistance change increases sharply under a large strain, irreversible structural damage appears, and repeated cycling induces a viscoelastic effect, which results in potential fracture and poor durability. To achieve controllable high sensitivity as well as good stretchability and durability, a novel design concept of auxetic materials/structures is integrated with a magnetic field sensing system in this work. The sensitivity of our strain sensors was tuned by tailoring the geometric dimensions of the auxetic structure. Upon mechanical loading, the sensors showed a structural deformation effect (i.e., longitudinal stretching accompanied by transverse structural deformation), which resulted in good stretchability and durability. As the strain increased, continuous stretching produced high sensitivity.
is the applied force change. Among the above-mentioned indicators, stretchability and durability are especially important because they ensure large stress loading and stable output of sensing signals after repeated deformation. Although resistance change increases sharply under a large strain, irreversible structural damage appears, and repeated cycling induces a viscoelastic effect, which results in potential fracture and poor durability. To achieve controllable high sensitivity as well as good stretchability and durability, a novel design concept of auxetic materials/structures is integrated with a magnetic field sensing system in this work. The sensitivity of our strain sensors was tuned by tailoring the geometric dimensions of the auxetic structure. Upon mechanical loading, the sensors showed a structural deformation effect (i.e., longitudinal stretching accompanied by transverse structural deformation), which resulted in good stretchability and durability. As the strain increased, continuous stretching produced high sensitivity.
Detailed structural parameters of various auxetic architectures were simulated by a finite element method. The examined auxetic structures are re-entrant hexagon, re-entrant plate, and modified re-entrant hexagon which is composed of re-entrant plate and re-entrant strut in the unit cells. The detailed structural parameters of the auxetic architecture were determined by a finite element modeling simulation. The variable structural Poisson’s ratio(ν) was achieved by tailoring the ratio and location of the structural parameters. The produced strain sensors of various patterns exhibited different sensitivities owing to changes in the strain distribution and in the strain levels along the auxetic structural parameters. Based on the FEM simulation, the effective contributions of the patterned strain sensors to the sensitivity were quantified. The structural Poisson’s ratio(ν), effective contributions and sensitivity of the auxetic strain sensor were presented to the relationship between the ratio and location of the structural parameters. (Ashby and Gibson, 1997) (Gibson et al., 1982) (Lakes, 2017) The auxetic pattern has negative structural Poisson’s ratio(ν) owing to 2D expansion. Its structure geometry includes many parameters, such as thickness, strut angle, width, distance of internal edge, and short straight length on both sides. (Gonella and Ruzzene, 2008) (Masters and Evans, 1996) Among them, thickness and short straight length on both sides were fixed and included angle, width, distance of internal edge were determined by FEM simulation and stress–strain curves. The typical auxetic structures are listed in Table 1. Three architectures were explored as the fundamental pattern. The structural Poisson’s ratio(ν) is calculated using eq. (3):
 (3)
(3)
where εx and εy represent the x-direction strain and y-direction strain.
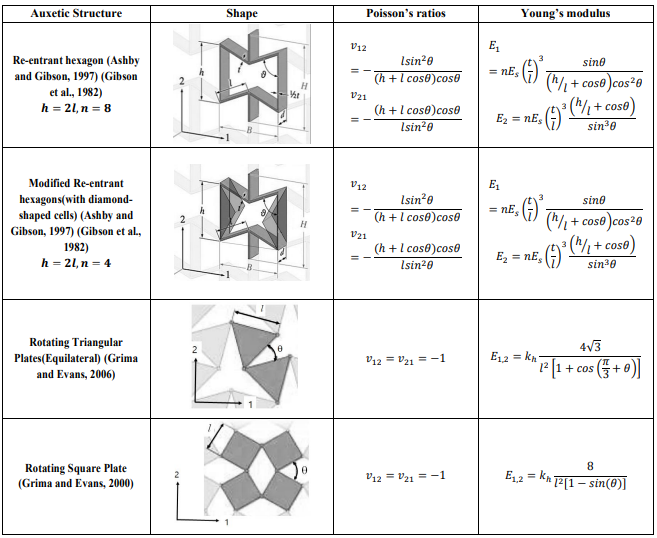
※ Properties of unit cell material: Es: Young’s modulus, v: Poisson’s ratio, kh: stiffness constant, n: no. of cell strut of re-entrant hexagon, B=2lsinθ, H=h+2lcosθ
Table 1: Characteristics of typical auxetic structure
To estimate the magnetic gauge factor, four auxetic structures with different surface areas can be considered, as shown in Table 2. Poisson’s ratio of four auxetic structures is shown in Figure 1 under the loading ranges. On the same locations of magnetic Hall sensors, the influences of the surface magnetic field areas may be verified. Auxetic structures can be integrated into the sensor architecture for improving its sensitivity. Auxetic structures are made to the sensor mixed with the magnetic powder and silicon material. Under application of the principal strain, the negative Poisson’s ratio of the auxetic structures causes the width to be increased during sensor deformation, unlike the normal sensors, where the width reduces in a similar situation. In the auxetic sensor, the increased rate of the width change causes the magnetic flux area expansion and subsequent thickness reduction, therefore affecting the capacitive change, and results in high sensitivity. When stretched, the segments in the auxetic structure rotate, resulting in an extension perpendicular to the direction of the applied strain. This deformation property leads to an increase in the width of the sensor instead of the normal decrease in width. In testing, a strong trend between linearity and the use of auxetic materials may be found, which is ideal for this application due to the increased consistency of the sensor. Additionally, it is found that including the strut’s increased consistency at the cost of range of resistance values. Furthermore, it was found that the shaped pattern of re-entrant structure can be found to be the ideal design to optimize linearity of data, in the feasible usability.
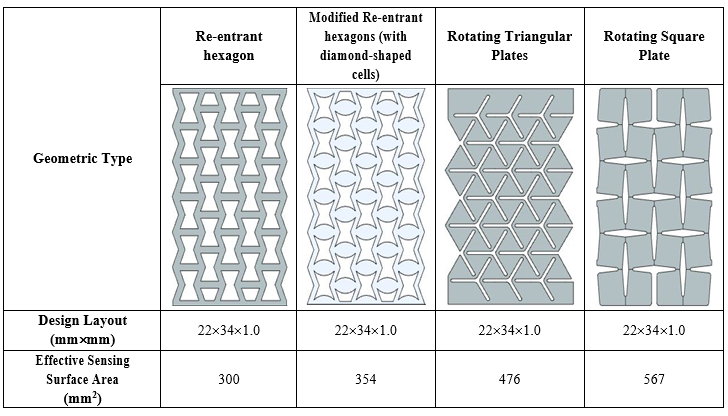
Table 2: Characteristics of auxetic structures’ geometries
Auxetic materials have unusual mechanical properties such as enhanced indentation resistance, vibration damping, and porosity variation that cannot be generally achieved with conventional materials. The auxetic effect of various geometric structures including conventional re-entrant hexagons and modified re-entrant hexagons were examined. Typical cell compositions of each structure are shown in Tables 1 and 2. Finite element analyses (FEA) with tensile & compressive loading conditions were performed on all four geometric structures using the Siemens Simcenter 3D. Tables 1 and 2 show the numerical material properties and geometric dimensions used in TPU (Thermoplastic PolyUrethane).
The trend of Poisson’s ratio was to examine the effect of the tensile force that was varied between -5.0 N and 5.0 N. The bottom surface of samples in Table 3 was fixed to a rigid structure and various input forces within the given range of forces were applied to the top surface to calculate Poisson’s ratio. All structures show the negative Poisson’s ratios as expected. As higher input forces are applied, the nonlinearity becomes more obvious for different materials. It is close to a linear behavior, but the slight non-linearity is caused by the change of the cell shapes as the auxetic structure is stretched more. To calculate the transverse strain, the displacements in axial and transversal directions are measured along the vertical and horizontal centerlines. Note that the top and bottom surfaces are made of thick solid material to minimize the variation in deformation on both ends. Figures 1 illustrates that Poisson’s ratio is affected by the tensile force for the auxetic structures.
| Material | Density (Kg/m3) | Young’s Modulus (Pa) | Poisson’s Ratio |
| TPUs | 1200 | 1.5306×107 | 0.48 |
Table 3: Material properties
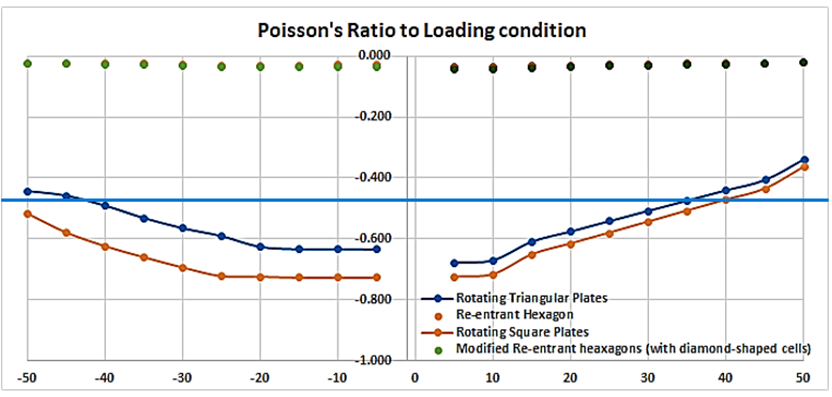
Figure 1: Comparison of Poisson’s ratios obtained from finite element analysis: Re-entrant hexagon, Modified Re-entrant hexagon, Rotating triangular plates and Rotating Square Plates
Notice that Poisson’s ratio for the rotating triangular and square plates have the variable values due to the nonlinearity while the re-entrant hexagons have relatively constant values in the input force range. As Young’s moduli are different for different materials, the Poison’s ratio is also different for different materials. However, both parameters show the same trend as the input forces are increased because these two pads have the same geometry and dimensions. The ratio of the strains is mainly the function of cell geometry and the material property in this range of deformation. This magnetic auxetic sensors were applied by various input forces within the given linear range of forces (0~1.0 N) and to the top surface to calculate Poisson’s ratio as shown in Figure 2 and the strain contours of auxetic structure types is shown in Figure 3.
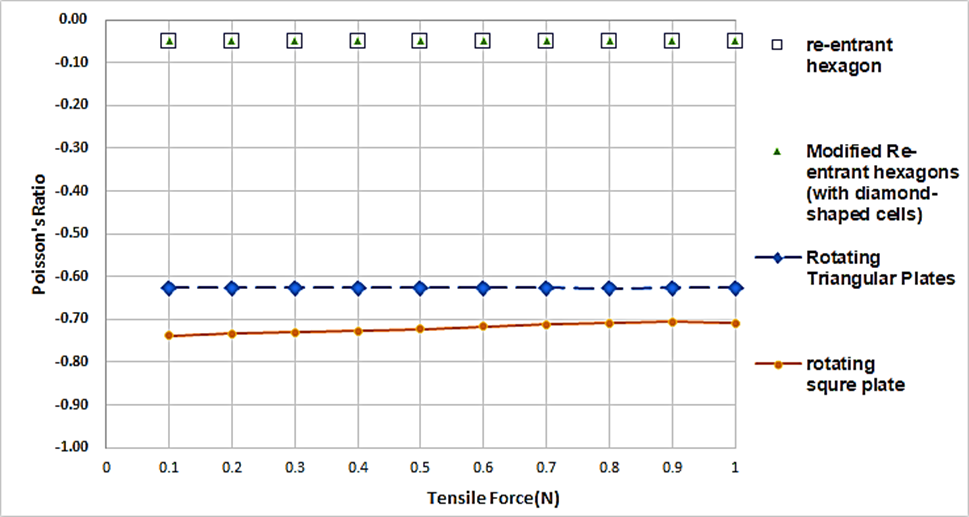
Figure 2: Poisson’s ratio of re-entrant structures for tensile loadings
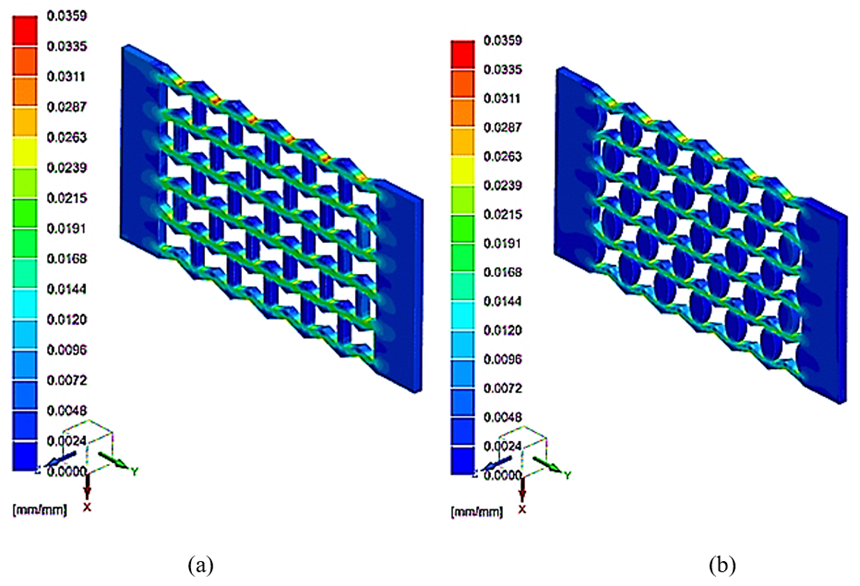
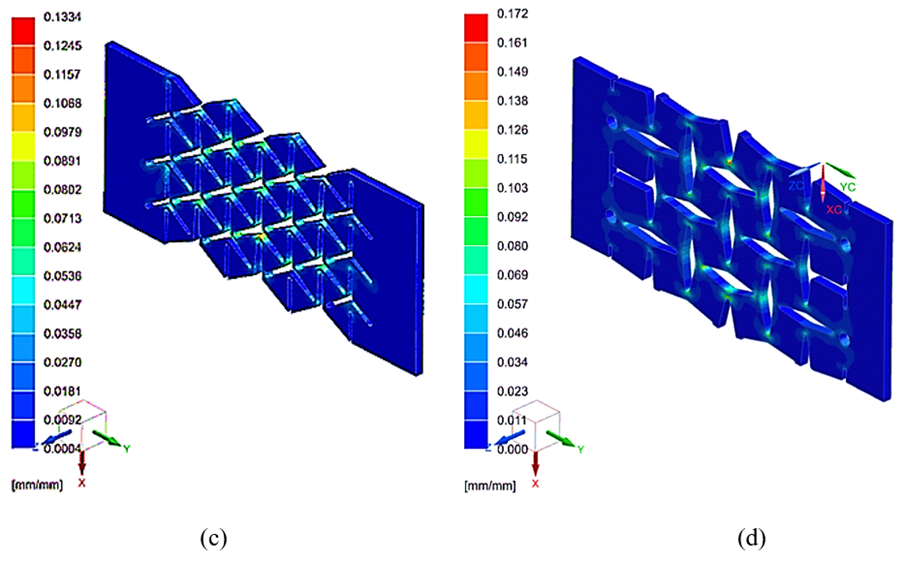
Figure 3: Strain contours of auxetic structure types for tensile loadings; (a) Re-entrant Hexagon, (b) Modified Re-entrant Hexagons (c) Rotating triangular plate, (d) Rotating rectangular plate
3.1 Fabrication of Soft-AMPS
The Rotating Square Plate auxetic structure of Soft-AMPS is designed to maintain a rectangular shape, and for this configuration, the material synthesis was carried out to obtain the required properties of silicon material. As shown in Figure 4, Eco-flex (1:1 mixture of casting and hardening materials) and PDMS (10:1 mixture of casting and hardening materials) were mixed at a 1:1 ratio. To prevent curing rejection, it was important to thoroughly mix each solution separately before combining them. Afterwards, NdFeB particles were added in a 1:1 weight ratio to the mixed silicone solution. In a vacuum chamber, bubbles were removed from the resulting mixture, which was injected into a mold created through 3D printing. To avoid the formation of a pseudo membrane that could reduce the efficacy of the sensor, the solution was carefully injected using a syringe instead of simply pouring and molding it. Next, the mold containing the solution was placed in an oven at 55 degrees Celsius for 3 hours. Once cured, the material was removed from the mold using tweezers.
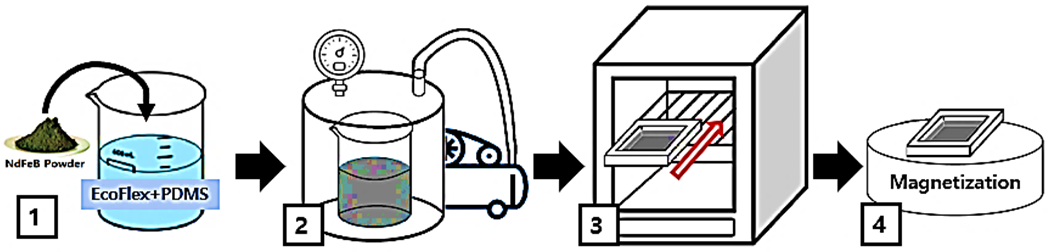
Figure 4: Fabrication process
3.2 Stretchability Test of Auxetic Magneto Tactile Sensor
The fabricated auxetic sensor has been combined with a PCB on which a Hall sensor is mounted as shown in Figure 5 (A) after magnetization on a circular neodymium magnet which has a magnetic field ranging from 300 to 700 mT. To evaluate the characteristics of auxetic structures based on patterns, four samples were prepared as shown in Figure 5 (B). The four samples had dimensions with a thickness of 1.2 mm, a width of 20~22 mm and a length of 33 mm. They were combined with the circuitry, like the configuration depicted in Figure 5 (A), and securely attached to the top and bottom clamps of a tensile testing machine (ESM303, MARK-10). Magnetic field variations were recorded using a 3-axis Hall sensor (MLX90393). The tensile test was conducted at a speed of 13mm per minute, and magnetic field data was automatically collected during the tensile process. The sum of factors was calculated by adding up the displacements of six data points, which were obtained from the top and bottom 3-axis magnetic vectors. At a 10% tensile strain, the sum of factors for the re-entrant hexagon was 77uT, for the modified re-entrant hexagon it was 90uT, for the rotating triangular plates it was 99uT, and for the rotating square plates it reached 169uT, as shown in Figure 5 (C). Furthermore, to assess the Poisson's ratio of each sample, the width and length of the samples were measured both before and after the tensile test. The calculated Poisson's ratios were -0.1, -0.12, -0.66, and -0.75, respectively, and this information is visually represented in Figure 5. Overall, the different values were obtained compared to the ones mentioned in section 2, and it was observed that patterns with thinner wires did not experience an increase in width during tension, due to compliant hinge behaviors of auxetic structures. This was attributed to the primary influence of the silicone material on the lack of width expansion.
The main factors that can affect the sum of factors in the magneto tactile sensor are expected to be the uniform distributed quantities of magnetic powders and changes in the magnetic vector. In the auxetic structure, factors that can influence this are seen as numerical values corresponding to the effective sensing region and Poisson's ratio, respectively. The effective surface area is large in the order of rotating square plate, rotating triangular plates, modified re-entrant hexagon, and re-entrant hexagon, which indicates that the larger surface area, the more amount of magnetic powder. Additionally, the Poisson's ratio is large in the order of rotating square plate, rotating triangular plates, modified re-entrant hexagon, and re-entrant hexagon (1N load or less). As shown in Figure 5 (C), the value of gauge factor is highest on the sample 4 (rotating square plate), which is like to the trend observed in the effective surface area and Poisson's ratio of auxetic structures
When the Rotating Square Plate auxetic structure expands, it induces a change in the angles of each quadrilateral cell. Magnetic powders with a specific magnetic vector undergo rotation along with the quadrilateral cells, resulting in a magnetic field displacement at the position of the Hall sensors. Four Hall sensors are paired up in twos, providing a total of six magnetic vector values as output. These six values are collected as data, with them serving as input and the tensile rate as the output, to be processed through a neural network in deep learning. Soft-AMPS attached to the joint zone are extended and monitored in conjunction with the joint's rotation.
Figure 5: Experiments schematics and results; (A) Illustration of Soft-AMPS, (B) The produced Auxetic samples are in order re-entrant hexagon, modified re-entrant hexagon, Rotating Triangular Plates and Rotating Square Plate, (C) Sum of factors for tensile ratio and Poisson's ratio is -0.1, -0.12, -0.66, -0.75 in that order
3.3 Effects of an Auxetic structure in a Sensor
An auxetic structure requires less force to obtain the same sensing value as a regular rectangular sensor of the same size. Additionally, when stretching the sensor over the same length, an auxetic structure demands less force. In Figure 6 (A), it can be observed that normal samples required approximately force of 1.0 N to induce a displacement of 100uT, whereas the auxetic samples required only about 0.2 N of force to achieve the same displacement. Furthermore, as shown in Figure 6 (B), when subjected to the same amount of tensile force, it was evident that the auxetic samples required less force compared to the normal samples. This is advantageous for applying sensors to small joints such as finger joints. We prepared a 33mm auxetic sensor and a regular rectangular sensor, both fixed at the length of 5mm of each sensor, in the same configuration. We conducted a tensile test using a testing machine while collecting data through an embedded board, and the experimental setup was identical to Figure 6 (C). The calculated sensitivity using equation (2) shows (110 µT)/(0.2 N)= 550 for the auxetic sensor, and (25 µT)/(0.2 N)= 125 for the conventional sensor.
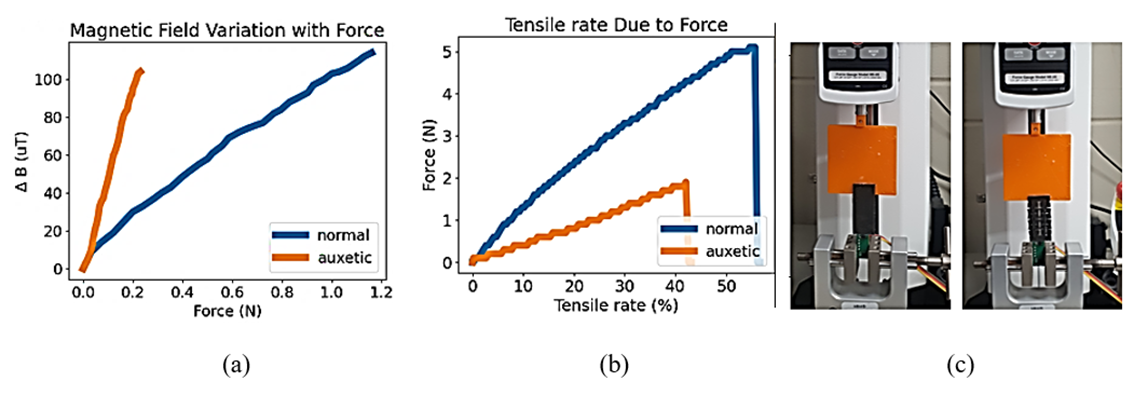
Figure 6: (A) Magnetic Field Variation with Force, (B) Tensile rate Due to Force, and (C) The experimental setup.
The auxetic pattern-based magneto tactile sensor has the advantage of the properties of the auxetic structure, and the Hall-sensing mechanism: the superior wearability and sensitivity of meta-structures, and the simplicity of the circuitry of Hall-sensing mechanism. In the numerical and experimental aspects, a square rotating pattern showed the highest negative Poisson’s ratio among various auxetic patterns. The influence of the mechanical property on the sensor’s sensitivity was further studied by integrating the pattern composed of silicone and magnetic particles to the Hall-sensor arrays with the offset calibration function. From the study, we observed a linear increase in the sensitivity with the increase in the Poisson’s ratio, indicating a better force localization of the auxetic structure, compared to the non-auxetic pattern.
The newly developed soft-AMPS in this study differs from previous auxetic sensors (Dong and Hu, 2023) in that it utilizes magnetism for sensing. Composed of materials like Ecoflex and PDMS, this material, along with the auxetic structure, is thin and stretchable, designed to be used as a skin strain gauge when attached to the skin. To prevent sensing errors caused by influences like magnetic effects due to movement, real-time offset adjustments were implemented. The auxetic structure and the low I/O magnetic sensor are advantageous for operation on human skin. Compared to non-Auxetic sensors, soft-AMPS has been confirmed to secure a large amount of strain and the required input with minimal force. Through this work, soft-AMPS has been shown to have advantages in features such as strain range, conformability, and wearability. In the future, by employing silicon 3D printing (Vo et al., 2023) to create more complex and efficient structures, it could potentially advance into a higher-performance sensor, becoming a crucial component of on-skin devices.
“This research was supported by the Alchemist Project (No. 1415187415, No. 20025750) funded by the Technology Innovation Program funded by the Korea Planning & Evaluation Institute of Industrial Technology (KEIT) and the Ministry of Trade, Industry, & Energy (MOTIE)”.
Dear Editorial Team, Clinical Medical Reviews and Reports. My experience with the journal was highly positive. The peer-review process was rigorous, constructive, and completed in a timely manner. The reviewers provided valuable comments that helped improve the quality and clarity of our manuscript. The editorial office was professional, responsive, and supportive throughout all stages of the publication process. Communication was clear and efficient, and any questions were addressed promptly. Overall, I found the journal to maintain high scientific standards and an excellent publication workflow. I would be pleased to consider submitting future work to this journal. Best wishes from, Elena Popa.

It was my pleasure to submit my testimonial concerning the Reviewer Board of our Scientific Journal “Brain and Neurological Disorders”. The Reviewers focused on some modifications and their contribution was helpful. The ladies of our Editorial Office were also supported my efforts. It was my honor to have such a co-operation and I am looking forward for more collaboration.

Dear Grace Pierce, Editorial Coordinator of Journal of Clinical Research and Reports, Thank you for the speedy and efficient peer review process. I appreciate the fact that your peer reviewers do not take months to respond like with some other journals. I would also like to thank the editorial office for responding quickly to my questions. It is an excellent journal. I plan to submit more manuscripts in the future. Best wishes from, Robert W. McGee

Dear Grace Pierce, Editorial Coordinator of Journal of Clinical Research and Reports, Working with you and your team on our recent publication in JCRR has been a truly wonderful and enjoyable experience. The responses were prompt, and the reviewers were patient, constructive, and highly professional. One reviewer in particular gave me the feeling that a professor was carefully reading and commenting on my coursework, which was deeply touching. The entire process was straightforward and hassle‑free, with no tedious online forms to complete. I highly recommend this journal. Best wishes from, DR Aibing Rao, Head of R&D

I Appreciate the Opportunity to Share my Experience with the Journal of Clinical Research and Reports. The peer review process was timely and constructive, and the feedback provided helped improve the quality of our manuscript. The editorial office was professional, responsive, and supportive throughout the process, ensuring smooth communication and efficient handling of the submission. Overall, it was a positive experience collaborating with your team.

Dear Mercy Grace, Editorial Coordinator of Obstetrics Gynecology and Reproductive Sciences, We would like to express our gratitude for your help at all stages of publishing and editing the article. The editors of the magazine answer all the necessary questions and help at every stage. We will definitely continue to cooperate and publish other works in the Obstetrics Gynecology and Reproductive Sciences! Best wishes from, Alla Konstantinovna Politova,
